After the OWHL electronics and housing have been assembled, the device can be statically calibrated if desired. Calibration could be accomplished by lowering the OWHL into a swimming pool or other still body of water (with minimal surface wave action) to a set of measured depths, and tracking the time each depth was reached.
Alternatively, we have mounted an OWHL in a port at the base of a vertical plastic pipe which can be filled with water to known depths, again recording the time that each known depth of water above the sensor was achieved.
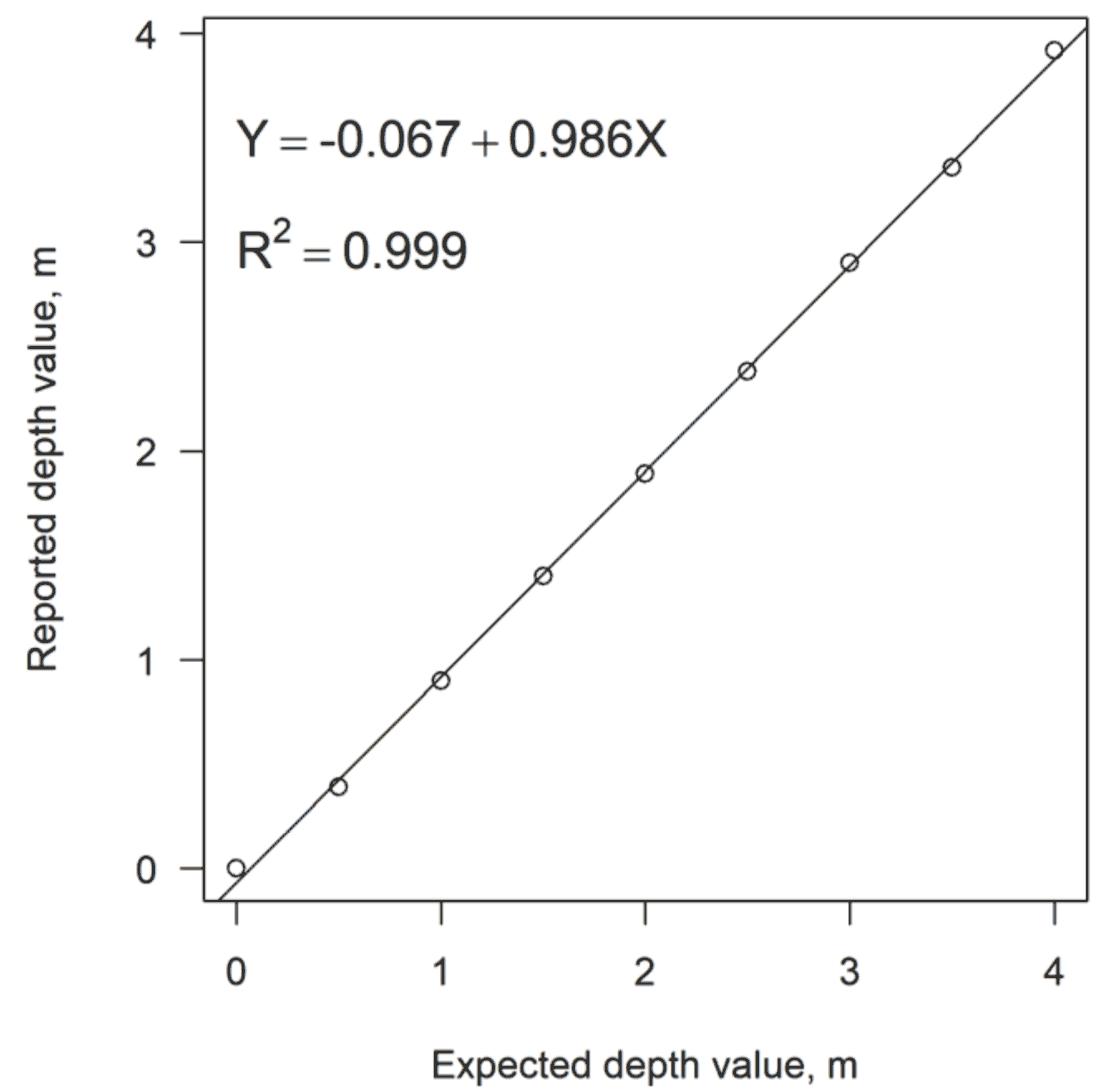
The timestamps in the CSV file produced by the OWHL can then be used to extract pressure readings at times that corresponded to the OWHL being held with a static head of water above it. All readings will include the pressure due to local air pressure, so we subtract off the initial pressure reading when the OWHL is not submerged from all of the test pressure readings. When using freshwater for calibration, we converted the reported pressure in mbar to meters of freshwater by dividing by 98.1. Using our standpipe calibration apparatus, we obtained excellent fit between the known depth and observed depth for an OWHL unit shown in Figure 34.
Figure 34: Calculated water depth values reported by an OWHL versus known water depths in a calibration apparatus. The regression equation and R2 for the best fit line between the expected and reported depth values is shown.